TBD
About the Project
The goal of this project is to deploy four electric, autonomous vehicles (AV) in a one-year pilot, offering an on-demand service that will cater to North Tulsa’s transportation needs. This pilot project is expected to support future investments in the use of autonomous vehicles in transit settings by demonstrating the use of AVs as a reliable community asset for transportation-challenged populations.
Through a $3.4 million grant awarded by the U.S. Department of Energy (DOE), researchers and technical experts at Cornell University, the Massachusetts Institute of Technology, and National Renewable Energy Laboratory will work with local organizations including MetroLink Tulsa, INCOG, the Terence Crutcher Foundation, and Impact Tulsa, to design and launch an on-demand autonomous transit service that directly addresses transportation needs identified by local residents of North Tulsa.
The project will begin with a community engagement effort to develop a comprehensive understanding of existing mobility challenges and barriers in the area. The information collected through engagement with the community will then be used to design the service in alignment with local needs.
How to get Involved
COMPLETE THE SURVEY
Residents of North Tulsa are invited to fill out our survey to share insights with the project team about their transportation experience and challenges.
ATTEND A LISTENING SESSION
The Terence Crutcher Foundation will facilitate several listening sessions with community members to dive deeper into local needs and priorities with respect to existing transportation options and potential future services.
FAQ
What Are Autonomous Vehicles?
Autonomous vehicles (AVs) use technology to partially or fully drive themselves. The Society of Automotive Engineers (SAE) has developed, and the U.S. National Highway Traffic Safety Administration (NHTSA) uses, a classification system for AVs with six levels based on the degree of human intervention required for each system:
Level 0: Momentary Driver Assistance System provides momentary driving assistance, like warnings and alerts, or emergency safety interventions while driver remains fully engaged and attentive. Examples of Level 0 autonomy include automatic emergency braking, forward collision warnings, and lane departure warnings.
Level 1: Driver Assistance System provides continuous assistance with either acceleration/braking OR steering, while driver remains fully engaged and attentive. Examples of Level 1 autonomy include adaptive cruise control and lane-keeping assistance.
Level 2: Additional Assistance System provides continuous assistance with both acceleration/braking AND steering, while the driver remains fully engaged and attentive. Examples of Level 2 autonomy include Tesla’s “Full Self-Driving” system and other systems like Nissan’s ProPilot Assist 2.0, Ford BlueCruise, and Volvo Pilot Assist.
Level 3: Conditional Automation System actively performs driving tasks, but cannot operate in all situations. If the system can no longer operate and prompts the driver, the driver must be available to resume all aspects of the driving task. According to the National Highway Traffic Safety Administration, Level 3 autonomy is not available on today’s vehicles available for consumer purchase.
Level 4: High Automation System is fully responsible for driving tasks within limited service areas while occupants act only as passengers and do not need to be engaged. Level 4 AVs operate using a 3D map of their service area, which limits operations to specified boundaries. This is the level of autonomy currently employed in robotaxi services like Waymo and Cruise, which operate without safety drivers.
Level 5: Full Automation System is fully responsible for driving tasks while occupants act only as passengers and do not need to be engaged. Unlike Level 4 AVs, Level 5 AVs are capable of operating in any environment, with no limitations of service area boundaries. As of 2024, there are no examples of Level 5 AVs being operated on public roads in the U.S.
Autonomous Vehicle Technologies
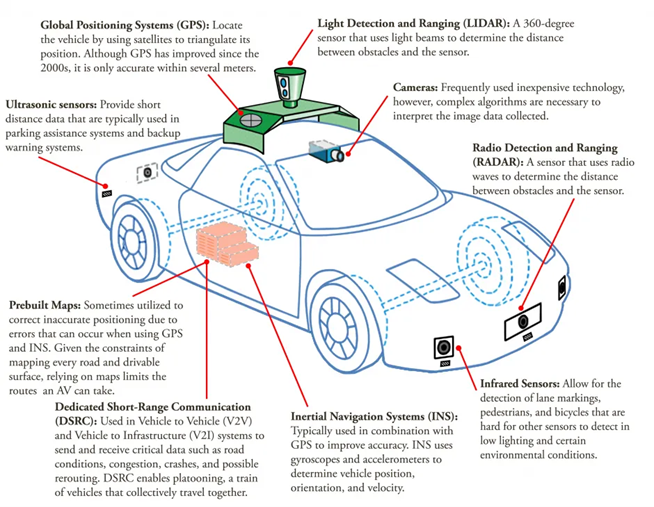
As AVs at Levels 1-3 require a human driver to be fully engaged, only Level 4 & 5 AVs can truly be characterized as autonomous. Autonomous vehicles utilize a combination of multiple advanced sensing technologies to safely navigate, including LIDAR, RADAR, cameras, ultrasonic sensors, infrared sensors, inertial navigation systems, dedicated short-range communications, GPS, and pre-built maps.
Are These Vehicles Safe?
This project will use Level 4 autonomous systems that have demonstrated a successful track record of safe operation. Autonomous vehicles have been in operation for years, and in some states, even without safety drivers. Tulsa’s AV pilot project will operate with safety drivers in each vehicle, providing an additional layer of safety and comfort for riders.
While vehicles are inherently not safe, autonomous technology has the potential to increase the safety of our roads. In fact, according to Waymo’s analysis of accidents occurring across over 25 million driverless miles of service, its autonomous systems achieved 81% fewer airbag deployment crashes and 72% fewer injury-causing crashes compared to an average human driver. Other companies operating driverless AV services also report improved rider safety outcomes compared to an average human driver.